Two first-authored TRO papers in the same year! My second T-RO paper on soft continuum robot is accepted!
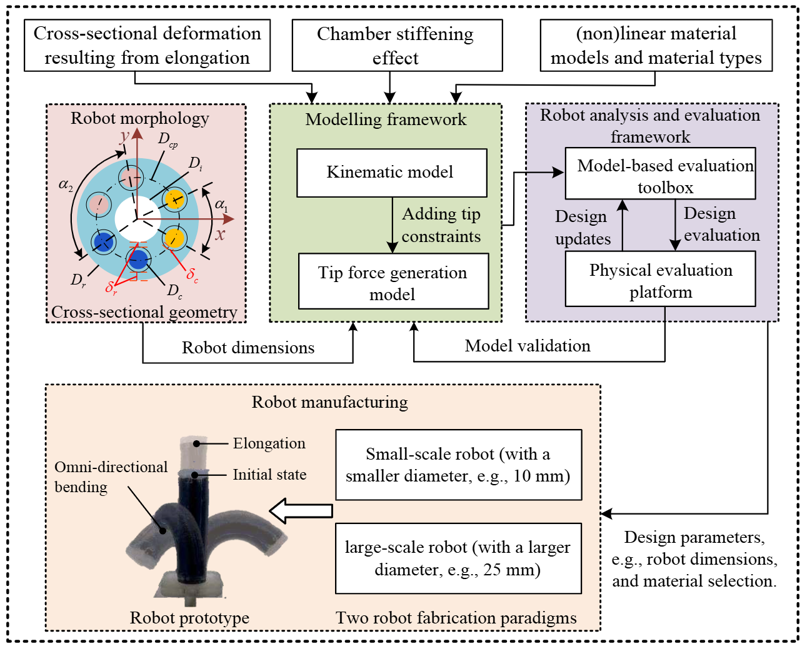
To enable informed decision-making on design specifications for the development of fibre-reinforced soft robots, this paper proposes a static modelling and evaluation framework to evaluate two key robot performances, i.e., forward kinematics and tip force generation capability, for soft robotic manipulators with multiple reinforced chambers, based on the robot geometric design and soft material properties. We first present the analytical statics modelling framework, including the forward kinematics and the tip force generation models. The modelling framework can investigate different material models, e.g., linear material model or nonlinear hyper-elastic models (Neo-Hookean model, Mooney-Rivilin model, Yeoh model and Ogden model) and incorporate the influences of the pressurisation chambers. The robot evaluation framework is then proposed by encapsulating the proposed analytical models into an open-accessible simulation toolbox with Graphical User Interface (GUI) to assess soft robots based on the design parameters. The toolbox can be downloaded from the Github repository [58]. Meanwhile, a physical platform is presented to achieve experimental evaluations of soft robots. We then validate our framework via a set of soft manipulators with eight different dimensions (outer diameters of 25 mm, 20 mm, 15 mm and 10 mm, lengths of 40 mm and 60 mm), from the robot fabrication to the simulation and experiment
And check out the Supplementary Video: