Medical Robots
Design and application of soft robots for medical applications
---
soft Laparoscope
---
The hand-held soft laparosope can fit to standard 12 mm trocar port and can be operated by a touch interface. Details are reported in the TMRB paper.

Operation of the device in a phantom:
---
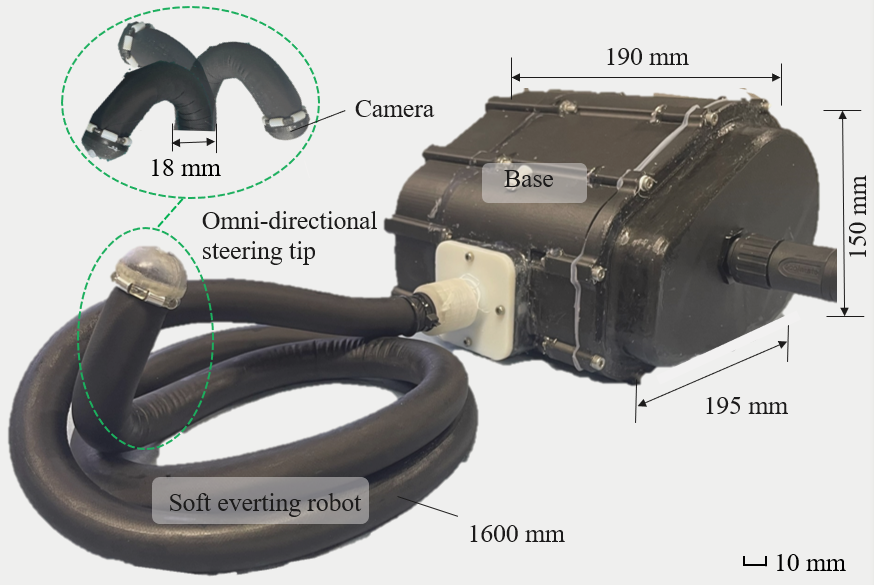
Self-propelled endoscope
---
This work presents the design, control and evaluation of a self-growing soft robotic colonoscope, leveraging the evertion principle. The device features a tube with an 18 mm diameter, constructed from stretchable fabric, which grows 1.6 m at the tip under pressurization. A pneumatically driven, elastomer-based manipulator enables omni-directional steering over 180 degrees at the tip. The robot operates in two modes: teleoperation via joysticks and autonomous navigation using sensor inputs, such as a tip-mounted camera. Thorough in-vitro experiments are conducted to assess the system’s functionality and performance. Results illustrate that the robot can achieve locomotion in confined spaces such as a colon phantom, while exerting contact forces averaging less than 0.3 N. This work is funded by the 5-million EPSRC Project EP/X033546/1 led by Prof. Ferdinando Rodriguez Y Baena and partially supported by the Multi-scale Medical Robotics Center, The Chinese University of Hong Kong.
And check out the Video: